
Biography: M. A. LARIBI is a Professor in the Fundamental and Applied Sciences Faculty of the University of Poitiers (UP), where he teaches robotics and mechanic. He has a Mechanical Engineer Degree (specialization on Mechanical Design) from École Nationale d’Ingénieurs de Monsatir (E.N.I.M.) in 2001. M.S. in Mechanical Design, 2002. He received his Ph.D. in Mechanics from University of Poitiers in 2005 and National Habilitation in Mechanics from University of Poitiers in 2018. His research interests, at the Department of G.M.S.C. of Pprime Institute, include robots design and mechanism synthesis. His main research area in mechanism theory focuses on Forward and Inverse Kinematics, Singular configurations, Workspace determination and Optimal design. M. A. LARIBI is a Full Professor in the Fundamental and Applied Sciences Faculty of the University of Poitiers (UP), where he teaches robotics and mechanic. He has a Mechanical Engineer Degree (specialization on Mechanical Design) from École Nationale d’Ingénieurs de Monsatir (E.N.I.M.) in 2001. M.S. in Mechanical Design, 2002. He received his Ph.D. in Mechanics from University of Poitiers in 2005 and National Habilitation in Mechanics from University of Poitiers in 2018. He serves as Associate Editor in several reputed internationals journals including ASME Journal of Medical Devices, Robotica (Cambridge), Wearable Technologies (Cambridge), Robotic Intelligence and Automation (Emerald Publishing), Mechanical Sciences (Copernicus Publications), International Journal of Advanced Robotic Systems: Bioinspired Robotics (SAGE), STEME Journal (AIMS), MDPI Robotics and MDPI Machines. He is a member of international scientific committee of RAAD, MeTrApp, RomanSy and MESROB. His research interests, at the Department of G.M.S.C. of Pprime Institute, include aspects on robots design, mechanism synthesis, cable driven robots, parallel robots, haptic interfaces, collaborative robots with more than 101 published peer reviewed journal papers, 11 edited books, 10 edited journal special issue, 13 PhD students. He is leading several national and international research projects in the fields of medical robotics and biomimetics.
Education
-
- National Habilitation, University of Poitiers, France (2018)
- Ph.D. in Mechanics, University of Poitiers, France (2005)
- Engineer in Mechanical Design, École Nationale d’Ingénieurs de Monsatir, Tunisia (2001)
Research interests
-
- Design of Mechanical Systems, Robotics, Kinematics, Parallel robots, Mechanisms Teaching activities, Mechanics and Robotics, mechatronics, synthesis of mechanism
Career
-
- Full Professor at the Fundamental and Applied Sciences, University of Poitiers (2024-present)
- Associate professor at the Fundamental and Applied Sciences, University of Poitiers (2010-2024)
- Associate professor in Mechanical Engineering at ENISo, Tunisia (2005-2010)
Academic Societies
-
- AFM (Association Française de Mécanique)
- IFToMM (International Federation for the Promotion of Mechanism and Machine Science)
- IEEE-IES (Industrial Electronics Society) and RAS (Robotics and Automation Society)
- ASME (American Society of Mechanical Engineers)
|
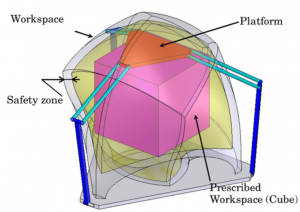
Analysis and dimensional synthesis of the DELTA robot for a prescribed workspace. |
Optimal torque distribution for a redundant 3-RRR spherical parallel manipulator used as haptic medical device |
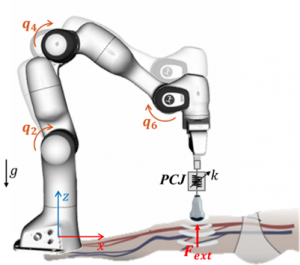
Cobot with Prismatic Compliant Joint Intended for Doppler Sonography |

|
Tele-operated system for minimally invasive surgery |
 Cable-Driven Parallel Robot for the cervical spine motion training Cable-Driven Parallel Robot for the cervical spine motion training |
|

Member of international scientific committee (ISC)
-
- MESROB: International Workshop on Medical and Service Robots
- RAAD: International Conference on Robotics in Alpe-Adria-Danube Region
- MeTrApp: International Conference on Mechanisms, Transmissions and Applications
- ROMANSY: CISM-IFToMM Symposium on Theory and Practice of Robots and Manipulators
- ISRM: International Symposium On Robotics And Mechatronics
Journal Editorships
- ASME Journal of Medical Devices: Associate Editor (2020-2028)
- Robotica: Associate Editor
- Wearable Technologies: Associate Editor
- Mechanical Sciences (Copernicus): Topical editor (2020-present)
- International Journal of Advanced Robotic Systems: Bioinspired Robotics – Associate Editors (2020-present)
- Robotic Intelligence and Automation: Associate Editor (2020-present)
- STEME Journal, American Institute of Mathematical Sciences: Editors in Chief (2020-present)
- MDPI Machines Journal: Editorial Board (2020-present)
- MDPI Robotics Journal: Topical editor (2019-present)
- MDPI Robotics: guest editor of special issue, December 2020
- ASME Journal of Medical Devices: Guest editor of special issue, December 2020
- ASME Journal of Mechanisms and Robotics: Guest editor of special issue, December 2019
Co-chair and Organizing committee
- MEDER2021, The 5th IFToMM Symposium on Mechanism Design for Robotics, from June 23 to June 25, 2021, France.
https://meder2021.sciencesconf.org/ - RAAD2021, The 30th International Conference on Robotics in Alpe-Adria-Danube Region, from June 21 to June 23, 2021, France.
https://iftomm-raad2021.sciencesconf.org/ - RAAD2020, The 29th International Conference on Robotics in Alpe-Adria-Danube Region, from June 17 to June 19, 2020, France.
https://iftomm-raad2020.sciencesconf.org/ - CK2017, The 7th International Workshop on Computational Kinematics that was held at Futuroscope-Poitiers, May 22-24, 2017, France.
https://iftomm-ck2017.sciencesconf.org - IEEE-INDIN 2016, International Conference on Industrial Informatics 18-21 July 2016, Futuroscope-Poitiers, France.
https://ieee-indin2016.sciencesconf.org - ISRM2015, The 4th IFToMM International Symposium on Robotics and Mechatronics, June 23-25, 2015 Poitiers, France.
http://isrm2015.sciencesconf.org/ - Robotics Workshop: trend and challenges, June 14, 2014 Marrakech, Morocco.
http://robotworkshop.sciencesconf.org/ - Robotics Pprime forum.
http://rpf2014.sciencesconf.org/
Publications [2013-2021]
Articles in peer-reviewed international journals
-2021-
- Ceccarelli M, Riabtsev M, Fort A, Russo M, Laribi MA, Urizar M. Design and Experimental Characterization of L-CADEL v2, an Assistive Device for Elbow Motion. Sensors. 2021; 21(15):5149.
- Baigunchekov Z, Laribi MA, Mustafa A, Kassinov A. Kinematic Synthesis and Analysis of the RoboMech Class Parallel Manipulator with Two Grippers. Robotics. 2021; 10(3):99.
- T. Essomba, J. Sandoval, M. A. Laribi, C. T. Wu, C. Breque, S. Zeghloul, J. P. Richer, “Torque Reduction of a Reconfigurable Spherical Parallel Mechanism Based on Craniotomy Experimental Data” Appl. Sci. 2021, 11, 6534.
- J. Sandoval, M. A. Laribi, J. P. Faure, C. Brèque, J. P. Richer and S. Zeghloul » Towards an Autonomous Robot-Assistant for Laparoscopy Using Exteroceptive Sensors: Feasibility Study and Implementation, » in IEEE Robotics and Automation Letters, vol. 6, no. 4, pp. 6473-6480, Oct. 2021.
- Ennaiem, F.; Chaker, A.; Laribi, M.A.; Arévalo, J.S.S.; Bennour, S.; Mlika, A.; Romdhane, L.; Zeghloul, S., “Task-based design approach: Development of a planar cable-driven parallel robot for upper limb rehabilitation” Journal Applied Sciences 2021, 11(12):5635.
- Saafi, H., Laribi, M. A., and Zeghloul, S.: Design of a 4-DoF (degree of freedom) hybrid-haptic device for laparoscopic surgery, Mech. Sci., 12, 155–164, https://doi.org/10.5194/ms-12-155-2021, 2021.
- Laribi, M. A., and Ceccarelli, M. (January 28, 2021). « Design and Experimental Characterization of a Cable-Driven Elbow Assisting Device. » ASME. J. Med. Devices. March 2021; 15(1): 014503.
- Ennaiem, F.; Chaker, A.; Arévalo, J.S.S.; Laribi, M.A.; Bennour, S.; Mlika, A.; Romdhane, L.; Zeghloul, S. Sensitivity Based Selection of an Optimal Cable-Driven Parallel Robot Design for Rehabilitation Purposes. Robotics 2021, 10, 7. https://doi.org/10.3390/robotics10010007
- Zapatero-Gutiérrez, A.; Castillo-Castañeda, E.; Laribi, M.A. On the Optimal Synthesis of a Finger Rehabilitation Slider-Crank-Based Device with a Prescribed Real Trajectory: Motion Specifications and Design Process. Appl. Sci. 2021, 11, 708. https://doi.org/10.3390/app11020708
- I. Ben Hamida, M. A. Laribi, A. Mlika, L. Romdhane, S. Zeghloul, G. Carbone, Multi-Objective Optimal Design of a Cable Driven Parallel Robot for Rehabilitation Tasks, Mechanism and Machine Theory, Volume 156, Février 2021, 104141, https://doi.org/10.1016/j.mechmachtheory.2020.104141
-2020-
- Saafi, H.; Laribi, M.A.; Zeghloul, S. Forward Kinematic Model Resolution of a Special Spherical Parallel Manipulator: Comparison and Real-Time Validation. Robotics 2020, 9, 62, https://doi.org/10.3390/robotics9030062
- Ayoubi, Y.; Laribi, M.A.; Arsicault, M.; Zeghloul, S. Safe pHRI via the Variable Stiffness Safety-Oriented Mechanism (V2SOM): Simulation and Experimental Validations. Appl. Sci. 2020, 10, 3810, https://doi.org/10.3390/app10113810
- Ben Hamida, I., Laribi, M. A., Mlika, A., Romdhane, L. and Zeghloul, S., 2020. Dimensional Synthesis and Performance Evaluation of Four Translational Parallel Manipulators. In: Robotica. 2020. p. 1–17. DOI 10.1017/S026357472000034X.
- J.S. Sandoval, M. A. Laribi, S. Zeghloul, M. Arsicault and J.-M. Guilhem, Cobot with Prismatic Compliant Joint Intended for Doppler Sonography, Robotics 2020, 9(1), 14; doi:10.3390/robotics90100142
-2019-
- Essomba, T., Hsu, Y., Sandoval Arevalo, J. S., Laribi, M. A., and Zeghloul, S. (September 11, 2019). «KinematicOptimization of a Reconfigurable Spherical Parallel Mechanism for Robotic-Assisted Craniotomy» ASME. J. Mechanisms Robotics. December 2019; 11(6): 060905.
- M. A. Laribi, G. Carbone, S. Zeghloul, « On the Optimal Design of Cable Driven Parallel Robot with a Prescribed Workspace for Upper Limb Rehabilitation Tasks » Journal of Bionic Engineering, 2019, 16: 503. https://doi.org/10.1007/s42235-019-0041-4.
- F. Courreges, M. A. Laribi, M. Arsicault, J. Absi, and S. Zeghloul. «In Vivo and in Vitro Comparative Assessment of the Log-Linearized Hunt–Crossley Model for Impact-Contact Modeling in Physical Human–Robot Interactions», Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, (March 2019). doi:10.1177/0959651819834750.
- J. S. Sandoval Arevalo, M. A. Laribi, S. Zeghloul, M. Arsicault, «On the Design of a Safe Human-Friendly Teleoperated System for Doppler Sonography». Robotics 2019, 8, 29.
- Y. Ayoubi, M. A. Laribi, S. Zeghloul, M. Arsicault, M. «V2SOM: A Novel Safety Mechanism Dedicated to a Cobot’s Rotary Joints». Robotics 2019, 8, 18.
-2018-
- C. A. Nelson, M. A. Laribi, S. Zeghloul, « Multi-robot system optimization based on redundant serial spherical mechanism for robotic minimally invasive surgery » Robotica, Published online: 01 August 2018, pp. 1-12, https://doi.org/10.1017/S0263574718000681
- C. Préault, H. Saafi, M.A. Laribi and S. Zeghloul, « Optimal design and evaluation of a dexterous 4 DoFs haptic device based on delta architecture » Robotica, Published online: 07 September 2018, pp. 1-22, https://doi.org/10.1017/S0263574718000929
- H. Saafi, M. A. Laribi, S. Zeghloul and M. Arsicault « On the development of a new master device used for medical tasks » Journal of Mechanisms and Robotics, ASME. J. Mechanisms Robotics. 2018;10(4):044501-044501-6. doi:10.1115/1.4039590.
- Y. Ayoubi, M. A. Laribi, F. Courrèges, S. Zeghloul, M. Arsicault «Complete design methodology of biomimetic safety device for cobots’ prismatic joints» Robotics and Autonomous Systems, Volume 102, April 2018, pp. 44–53, doi: https://doi.org/10.1016/j.robot.2018.01.008.
-2017-
- L. Nouaille, M.A. Laribi, C.A. Nelson, S. Zeghloul, G. Poisson « Review of kinematics for minimally invasive surgery and tele-echography robots » Journal of medical devices ASME, 2017, 11(4):040802-040802-14, doi:10.1115/1.4037053.
- H. Saafi, M. A. Laribi and S. Zeghloul, « Optimal torque distribution for a redundant 3-RRR spherical parallel manipulator used as a haptic medical device » Robotics and Autonomous Systems, Volume 89, 2017, pp 40-50, doi:http://dx.doi.org/10.1016/j.robot.2016.12.005
- H. Lamine, M. A. Laribi, S. Bennour, L. Romdhane, S. Zeghloul, « Design study of a Cable-Based Gait Training Machine » Journal of Bionic Engineering, Volume 14, Issue 2, 2017, pp. 232-244, doi: https://doi.org/10.1016/S1672-6529(16)60394-3.
- H. Saafi, M. Vulliez, S. Zeghloul, M. A. Laribi « A new serial approach of the Forward Kinematic Model of Spherical Parallel Manipulators for real-time applications » Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, First Published January 10, 2017, doi: https://doi.org/10.1177/0954406216688027.
-2016-
- T. Essomba, M. A. Laribi, S. Zeghloul and G. Poisson, « Optimal synthesis of a spherical parallel mechanism for medical application » Robotica, Volume 34, Issue 03, 2016, pp. 671-686, doi: 10.1017/S0263574714001805.
- L. Nouaille, M. A. Laribi, C. A. Nelson, T. Essomba, G. Poisson and S. Zeghloul, « Design process for robotic
medical tool guidance manipulators » Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2016, Volume . 230, no. 2, pp. 259-275, doi: https://doi.org/10.1177/0954406215590639.
-2015-
- H. Saafi, M.A. Laribi and S. Zeghloul, « Forward kinematic model improvement of a spherical parallel manipulator using extra sensor » Mechanism and Machine Theory, Volume 91, 2015, pp 102-119, doi: 10.1016/j.mechmachtheory.2015.04.006.
- H. Saafi, M.A. Laribi and S. Zeghloul, « Redundantly actuated 3-RRR spherical parallel manipulator used as a haptic device: improving dexterity and eliminating singularity » Robotica, Volume 33, 2015, pp. 1113-1130, doi:10.1017/S0263574714001751
-2014-
- A. Chaker, A. Mlika, M.A. Laribi, L. Romdhane and S. Zeghloul, « Accuracy analysis of non-overconstrained spherical parallel manipulators » European Journal of Mechanics – A/Solids, Volume 47, 2014, pp. 362-372, doi:https://doi.org/10.1016/j.euromechsol.2014.06.005.
- T. Li, M. Ceccarelli, M. Luo, M. A. Laribi, S. Zeghloul, « An Experimental Analysis of Overcoming Obstacle
in Human Walking », Journal of Bionic Engineering, Volume 11, Issue 4, 2014, pp. 497-505, doi: https://doi.org/10.1016/S1672-6529(14)60062-7. - T. Essomba, L. Nouaille, M. A. Laribi, C.A. Nelson, S. Zeghloul and G. Poisson, « Spherical wrist dimensional synthesis adapted for tool-guidance medical robots » Mechanics & Industry, Volume 15, Issue 03, 2014, pp. 217-223, doi: http ://dx.doi.org/10.1051/meca/2014022.
- T. Essomba, M.A. Laribi, L. Nouaille, S. Zeghloul, G. Poisson and P. Vieyers « A specific performances comparative study of two spherical robots for tele-echography application » Proceedings of the Institution of Mechanical Engineers, Part C : Journal of Mechanical Engineering Science, 2014, Volume. 228 no. 18, pp. 3419-3429, doi: 10.1177/0954406214530598.
-2013-
- A. Chaker, A. Mlika, M.A. Laribi, L. Romdhane and S. Zeghloul, « Clearance and manufacturing errors’ effects on the accuracy of the 3-RCC Spherical Parallel Manipulator » European Journal of Mechanics- A/Solids, Volume 37, 2013, pp. 86-95, doi: https://doi.org/10.1016/j.euromechsol.2012.05.009.