





- Membres permanents
- Post-doctorants
- Thésards
- Stagiaires
- Anciens thésards & post-doctorants
- Chercheurs invités
 |
 |
 |
 |
 |
| Marc Arsicault, MCF-HDR | Cyril Breque, MCF | Med Amine Laribi, PR
(Responsable d'équipe) |
Abdelbadiâ Chaker, MCF | Saïd Zeghloul, PR |
|
Mykhailo Riabtsev
|
(2023 - 2025). Sujet de post-doc: « ... ». Direction : M. A. Laribi, J. Sandoval, V. Petuya Arcocha ----- To be filled -----
Contact : riabtsev.m@gmail.com |
|
Ferdaws Ennaiem
|
(2023 - 2025). Sujet de post-doc: « Robot chirurgical pour la découpe osseuse par laser femtoseconde en chirurgie cranio-maxillo-faciale ». Direction : M. A. Laribi, J. Sandoval Lors d'une chirurgie d'ostéotomie, des instruments mécaniques sont généralement utilisés. Cependant, malgré leur efficacité, ces outils sont peu précis, notamment pour les formes de coupe compliquées. En outre, ils provoquent des dommages d'origine thermiques et physiques au niveau de l'os concerné, ce qui affecte sa régénération. C'est dans ce contexte que ce projet est proposé. Il consiste à combiner les apports des bras robotiques collaboratifs, notamment en termes de précision, avec l'utilisation du laser femtoseconde pour une découpe athermique et sans contact de l'os. Ainsi, les principaux axes abordés dans ce travail sont l'identification du positionnement optimal du bras robotique par rapport au patient et le contrôler du robot pour qu'il suive la trajectoire prédéfinie de la coupe en tenant compte des éventuels mouvements perturbateurs de la tête du patient.
Contact : ferdaws.ennaiem@univ-poitiers.fr |


Siwar Bouzid |
(2022 - en cours). Sujet de thèse : « Approche robotique pour l’assistance à l’apprentissage et à l’évaluation du geste coelioscopique ». Direction : M. Arsicault, S. Bennour, A. Chaker Il s’agit d’une thèse en cotutelle entre l'Université de Sousse et l'Université de Poitiers dont l’objectif est d’étudier et de développer une plateforme d’entrainement et d’évaluation de la chirurgie coelioscopique proche des conditions écologiques d'utilisation (conditions réelles) des chirurgiens. La finalité du travail est de fournir un dispositif avec un haut degré de performance et d'acceptabilité, permettant d'améliorer la courbe d'apprentissage des étudiants praticiens en chirurgie. Ceci permettra de rationaliser les efforts d’encadrement des formateurs experts à travers des évaluations quantitatives des performances et des enregistrements des mouvements des apprentis. Un niveau avancé d’assistance robotisé sera fourni pour guider la formation des chirurgiens en se basant sur des mouvements étalon d’experts. Ainsi, la thèse sera élaborée en étroite collaboration avec une équipe de chirurgiens experts et des étudiants en médecine afin d’identifier les besoins clés et aboutir à un dispositif permettant un rapprochement le plus fidèle possible des conditions opératoires réelles.
Contact : siwar.bouzid@univ-poitiers.fr |
|
Elie Gautreau
|
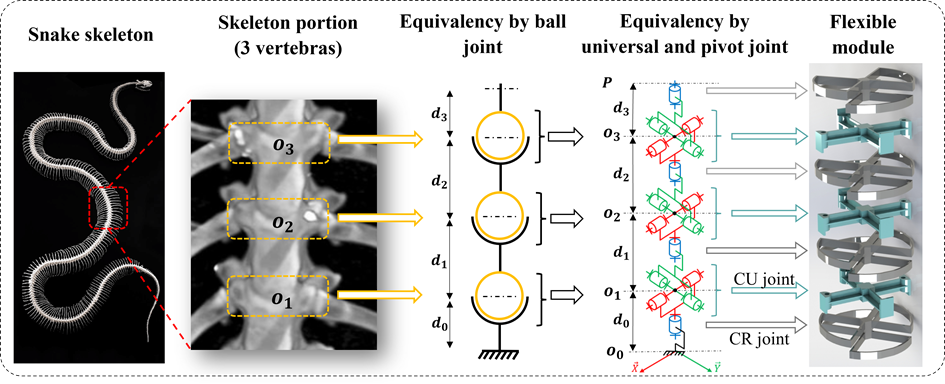
(2021 - en cours). Sujet de thèse : « Synthèse biomimétique pour la robotique bio-inspirée : application à la nage ondulatoire de serpent drone ». Direction : M. A. Laribi, X. Bonnet Étudier les serpents et prendre des mesures précises de leurs mouvements pour qualifier et quantifier l’efficacité énergétique de leur nage est une étape importante. Tester l’impact de modifications de paramètres cinématiques requiert une obéissance de leur part, ce qui est impossible. La solution envisagée est l’utilisation d’un drone serpent bio-inspiré, reproduisant la nage ondulatoire des serpents biologiques. Un tel robot relevant du biomimétisme est un outil développé par les roboticiens pour les biologistes s’insérant dans une boucle de rétroaction pour mettre à l’épreuve des hypothèses biologiques.Ainsi, mon projet doctoral vise à développer un système mécatronique complexe par biomimétisme reliant la cinématique ondulatoire aux performances et à l’efficacité de la nage des serpents. Il s’agit à la fois de contribuer à la constitution d’une vaste collection de cinématiques à l’aide d’enregistrements précis, et de développer une méthode biomimétique optimale permettant l’amélioration de la conception des drones plus économes en énergie. A long terme, ce projet doit permettre la collaboration entre les roboticiens et les industriels impliqués dans le développement de drones serpents bio-inspirés. Aussi, le biomimétisme pourra être intégré aux programmes d’enseignements supérieurs dans les années à venir en incluant l’importance grandissante des process et technologies de bio-inspiration.Cette thèse reposera sur trois grands objectifs. (1) Réaliser une étude cinématique de la nage volumique des serpents biologiques à travers une campagne de prises de mesures par capture de mouvements et par vidéos. (2) Développer la cinématique d’un module bio-inspiré et l’exploiter dans la réalisation d’un serpent bio-inspiré multi-modules. (3) Développer et intégrer la commande du robot en reproduisant les mécanismes de nages des serpents de manière fidèle et fiable pour les scientifiques.
Contact : elie.gautreau@univ-poitiers.fr |
|
Alizée Koszulinski
|
(2021 - en cours). Sujet de thèse : « Plateforme robotique pour la chirurgie cervicale assistée et sûre ». Direction : M. A. Laribi, J. Sandoval Ce projet de recherche collaboratif vise à développer une plateforme robotique sure pour la chirurgie de la colonne vertébrale. Le système à proposer sera constitué d’un bras robotique collaboratif et d’une interface de commande à retour haptique. L’ensemble du système viendra assister le chirurgien dans un schéma de co-manipulation ou tele-opération. L’utilisation de l’outil robotique vise à améliorer la précision et à réduire les taux de complications. Grâce à cette technologie robotique, les chirurgiens et les neurochirurgiens en particulier pourront planifier des procédures et obtenir des résultats reproductibles.
Contact : alizee.koszulinski@univ-poitiers.fr |
|
Majdi Meskini
|
(2021 - en cours). Sujet de thèse : « Développement d’un système collaboratif macro mini avec un retour haptique lié à l’environnement réel ou virtuel ». Direction : M. A. Laribi, A. Mlika, M. Arsicault, H. Saafi Les travaux menés dans le cadre de cette thèse en cotutelle entre l’université de Poitiers et l’université de Sousse portent sur le développement d’un système collaboratif macro mini avec un retour haptique lié à l’environnement réel ou virtuel afin d’être utilisé dans la chirurgie cervicale. Le système robotique à développer sera composé d’un robot collaboratif conventionnel sur lequel sera monté un dispositif mini guidé par une interface haptique d’architecture innovante.
Contact : majdi.meskini@univ-poitiers.fr |
|
Amir Trabelsi
|
(2021 - en cours). Sujet de thèse : « Contribution à la conception d'un système multi-robots pour la chirurgie mini-invasive afin de réaliser des expériences sur le modèle cadavérique ». Direction : M. A. Laribi, A. Mlika, J. Sandoval, S. Lahouar C’est une thèse en cotutelle entre l'Université de Sousse et l'Université de Poitiers. L'objectif est de développer et de mettre en capacité opérationnelle un système expérimental multirobots de porte-outils et d’interfaces haptiques pour réaliser expérimentalement des tâches de chirurgie mini-invasives tout en maintenant la cohabitation sécurisée entre les différentes composantes présentes dans le bloc opératoire.
Contact : amir.trabelsi@univ-poitiers.fr |




Anciens stagiaires
|
Alizée Koszulinski
|
(2021 - 2022). Sujet de stage : « Assistant robotique pour la chirurgie cervicale avec couplage visuel extéroceptif » Alizée Koszulinski a obtenu sa licence en Sciences et Génie des Matériaux de l’Université de Pau, France, en 2019. Elle est actuellement étudiante en Master Ingénierie de Conception, parcours Biomécaniques, à l’université de Poitiers. Son stage de fin d’étude, effectué au sein de l’équipe CoBRA et en collaboration avec le laboratoire international associé Franco-Taiwanais RACeS, consiste à développer une plateforme robotique pour la chirurgie du rachis cervical. L’assistance fournie par le comanipulateur vise à améliorer la précision et à réduire les taux de complications de l’acte chirurgical.
Contact : alizee.koszulinski@etu.univ-poitiers.fr
|
|
Aya Gouiaa
|
(2021 - 2022). Sujet de stage : « Modélisation et commande d'un robot parallèle à câbles plan (RPCP) dédié à la rééducation des membres supérieurs » Tunisienne, élève ingénieur en mécatroniques et étudiante en Master 2 Perception Artificielle et Robotique. En double diplomation entre l’école Nationale d’ingénieurs de Sousse (ENISo) et SIGMA CLERMONT / université Clermont Auvergne. Actuellement stagiaire au sein de l’équipe CoBRA. Mon sujet porte sur la co-manipulation homme-robot : l’intégration d’un capteur d’effort à 6 axes dans une plateforme à câbles parallèle plan ainsi que sa modélisation et son commande. Ce Prototype est destiné pour la rééducation des membres supérieurs.
Contact : aya.gouiaa@sigma-clermont.fr
|
|
Elie Gautreau
|
(2021 - 2022). Sujet de stage : « Conception d’un premier module mécatronique bio-inspiré » Elie est titulaire d'un DUT en Génie Mécanique et Productique de l'Université de Rennes, France, 2018 et actuellement étudiant en Master Ingénierie de Conception, parcours Génie Mécanique à l'Université de Poitiers. Il effectue un stage de fin d'études dans l'équipe CoBRA dans le cadre du projet ANR DRAGON 2. Son travail porte sur la conception d'un robot serpent bio-inspiré. Le premier objectif est d'extraire et de traiter la locomotion de la nage du serpent à partir d'essais expérimentaux sur diverses espèces terrestres et aquatiques. Ces données sont transférées à un robot serpent bio-inspiré pour reproduire leurs mouvements afin d'apporter des réponses aux biologistes sur la compréhension du retour à une vie aquatique des serpents.
Contact : elie.gautreau@etu.univ-poitiers.fr
|
|
Aurélien Thomas
|
(2021 - 2022). Sujet de stage : « Intégration et validation expérimentale d’une plateforme cobotique hyper-redondante » Actuellement étudiant en Master 2 Ingénierie de Conception Parcours Systèmes Automatisés et Robotique Avancée à l’université j’effectue mon stage au sein de l’institut Pprime. Mon stage porte sur la mise en œuvre d’une plateforme robotique redondante développée au sein de Pprime. La plateforme est destinée à la réalisation d’échographies téléopérées, il faut donc développer les différentes stratégies : gestion de la redondance, compliance.
Contact : aurelien.thomas@etu.univ-poitiers.fr
|
|
Meroua Bengadem
|
(2021 - 2022). Sujet de stage : « Réalité augmentée pour l’assistance à l’apprentissage du geste chirurgical »
Étudiante en master 2 robotique et décision à l’université Toulouse 3, je fais mon stage à l’Institut Pprime avec l’équipe CoBRA, mon sujet de stage porte sur la réalité augmentée pour l’assistance à l’apprentissage du geste chirurgical. L’objectif de ma mission est de pouvoir détecter les instruments de la chirurgie coelioscopique, de suivre leurs mouvements et de concevoir une scène complémentaire à la réalité (réalité augmentée) de façon à offrir un retour sur la qualité des gestes chirurgicaux, dans le but d’améliorer la formation des étudiants en chirurgie coelioscopique.
Contact : meroua.bengadem@univ-tlse3.fr, marwabengadem@gmail.com
|
|
Clément Petinon
|
(2021 - 2022). Sujet de stage : « Analyse et implémentation d’un algorithme de suivi pour un robot porte-caméra autonome »
Pour mon stage de Master 2 dans l'équipe CoBRA, le sujet consiste à implémenter un algorithme dans une carte embarquée (Nvidia Jetson), permettant la détection d’objet. Cette fonction servira à localiser les outils d’un robot chirurgien en temps réel à partir du flux vidéo d'une caméra montée sur le robot. Pour ce faire, nous étudions les méthodes d’entraînement de type deep learning pour pouvoir détecter les objets souhaités.
Contact : clement.petinon@etu.univ-poitiers.fr
|
|
Siwar Bouzid
|
(2021 - 2022). Sujet de stage : « Analyse et implémentation d’un algorithme de suivi pour un robot porte-caméra autonome »
Élève ingénieur en Génie Mécanique et Productique à l’école Nationale d’Ingénieurs de Sousse (ENISo) et inscrite en Master 2 en Mécanique et ingénierie de systèmes à l’ENISo. Elle effectue un stage de fin d’études en ingénierie au sein de l’équipe CoBRA à l’Institut Pprime. Son sujet porte sur la résolution du problème de mesure par le développement d’une approche de calibration automatique d’un capteur d’efforts à six axes. Le travail est mené sur deux phases : La première consiste à configurer l’acquisition des données mesurées par le capteur. La deuxième est d’implémenter l’algorithme de calibration automatique développé sur le contrôleur du robot et qui sera validé expérimentalement sur la plateforme robotique. Aussi, dans le cadre de son sujet de fin d’études en master 2, elle est en train de développer un prototype d’interface maître pour application d’échographie Doppler. L’interface est basée sur un robot parallèle à deux degrés de liberté qui présente la particularité d’assurer uniquement des mobilités en orientation avec un centre de rotation mobile.
Contact : siwar.bouzid@eniso.u-sousse.tn |





Thèses soutenues
| (2018 - 2022) | Ferdaws Ennaiem, « Approche optimale pour la synthèse des robots à câbles dédiés à la rééducation fonctionnelle », soutenue le 18/11/2022. Direction : M. A. Laribi, J. Sandoval, A. Mlika, L. Romdhane |
| (2017 - 2021) | Inès Ben Hamida, « Synthèse typologique et dimensionnelle des mécanismes à chaînes cinématiques fermées : application aux robots parallèles », soutenue le 10/11/2021. Direction : M. A. Laribi, S. Zeghloul, L. Romdhane |
| (2016 - 2019) | Célestin Préault, « Contribution à la conception et la mise en œuvre d’un robot d’assistance aux gestes chirurgicaux », soutenue le 13/12/2019. Direction : M. Arsicault, M. A. Laribi |
| (2016 - 2019) | Camille Mizera, « Développement d’un préhenseur multi-digital marinisé dans un contexte de télémanipulation à retour d’efforts », soutenue le 18/12/2019. Direction : J.P. Gazeau, S. Zeghloul, M. A. Laribi |
| (2015 - 2018) | Younsse Ayoubi, « Contribution au développement d’un dispositif de sécurité intelligente pour la cobotique », soutenue le 10/07/2018. Direction : S. Zeghloul, M. A. Laribi |
Anciens post-doctorants
-
- Inès Ben Hamida (2020), PHC Utique
- Hanén El Golli (2020), PHC Utique
- Houssem Saafi (2015 - 2017), ANR SISCob
-
- Eduardo Castillo Castañeda, Professeur à l'Instituto Politécnico Nacional (Mexique), invité pour 1 an (2022-2023)
-
- Carl Nelson, Professeur à l’University of Nebraska-Lincoln (USA), invité en 2016 et 2020
-
- Elena De Momi, Professeur au Politecnico di Milano (Italie), invitée en 2019
-
- Terence Essomba, Professeur à The National Central University (Taiwan), invité en 2018 et 2019
-
- Giuseppe Carbone, Professeur à l’University of Calabria (Italie), invité en 2017 et 2018
-
- Lotfi Romdhane, Professeur à l’American University of Sharjah (UAE), invité en 2015
Financé par : ![]()

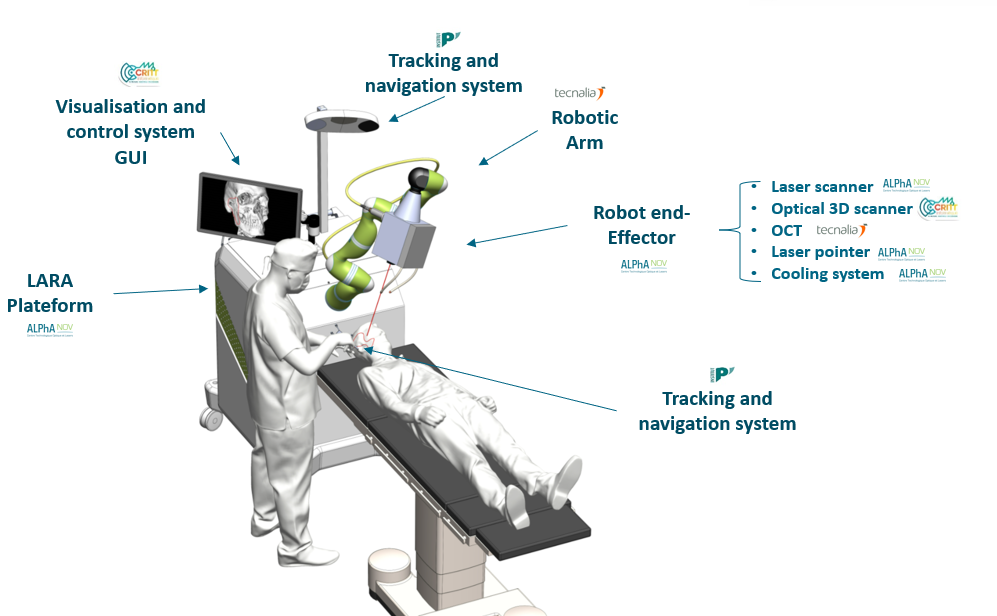
Projet LARA (LAser Robotic Applications : Robot chirurgical pour la découpe osseuse par Laser fs en chirurgie cranio-maxillo-faciale)

L’objectif du projet LARA (LAser Robotic Applications : Robot chirurgical pour la découpe osseuse par Laser fs en chirurgie cranio-maxillo-faciale) est la réalisation d’un dispositif médical de chirurgie robotique qui donnera au chirurgien la possibilité d’avoir une main augmentée, capable d’exécuter des gestes difficiles avec une finesse et une précision hors norme. Cette plateforme robotisée fonctionnera dans une configuration collaborative où le chirurgien définira pré et per-opératoirement la trajectoire 3D de découpe qui sera exécutée de manière autonome et conforme par le robot sans les tremblements ou les imperfections du mouvement humain.
Le consortium transdisciplinaire du projet LARA fait intervenir 6 partenaires (ALPhANOV, Pprime, Tecnalia France, CHU de bordeaux et CRITT Informatique) provenant de différents secteurs avec des compétences très variées et animées par l’objectif commun de produire une innovation au service des patients, à terme transférable à l’industrie.

ANR DRAGON2
Site web : https://anr-dragon2.cnrs.fr/
Les transitions-retour vers la vie aquatique ont façonné de nombreux organismes et fortement impacté les écosystèmes marins fossiles et actuels. Toutefois, les processus évolutifs impliqués sont difficiles à étudier car des étapes-clés manquent dans les lignées actuelles. Les serpents, objet de ce projet, font exception. Tous les intermédiaires existent et un seul mode de déplacement par ondulations est efficace sur terre et dans l’eau. Notre hypothèse centrale est que l’adaptation à la vie aquatique a modifié la cinétique des ondulations pour optimiser la nage en minimisant les forces de résistance tout en maximisant celles de propulsion. L’efficacité énergétique de la nage devrait donc être plus grande chez les espèces aquatiques. Cependant, mesurer simultanément les performances de la nage, la cinématique ondulatoire et la dépense énergétique est techniquement difficile, notamment de façon non-invasive. En outre, l’effort physique peut être partiellement découplé de la consommation en oxygène chez les serpents, ce qui rend les techniques classiques (e.g. respirométrie) imprécises. Une option consiste à mesurer le coefficient de traînée d’un animal qui nage : les structures vorticales produites à chaque intervalle de temps peuvent être utilisées pour quantifier précisément l’efficacité de la nage. Mécanique des fluides et modélisation numérique seront mobilisées pour traiter ce problème complexe qui implique des structures déformables. Mais ce projet s’appuie aussi sur la robotique. Des serpents- robots bio-inspirés seront construits pour tester expérimentalement les relations entre cinématique, dépense énergétique et trainées hydrodynamiques.
Ce projet multidisciplinaire comporte 5 volets (WP).
WP1 : l’optoélectronique et la cinématique par rayons-X en 3D seront utilisées pour analyser la cinématique ondulatoire (fréquence et amplitude) de la nage de serpents en laboratoire. Les trainées seront mesurées grâce à la vélocimétrie par images de particules. Une gamme d’espèces terrestres, amphibies et aquatiques sera testée.
WP2 : les données obtenues seront utilisés pour paramétrer les robots afin de tester l’impact de cinématiques sur les forces propulsives et de résistance.
WP3 : la surface de la peau de différents serpents sera examinée en microscopie électronique, micro-tomographie, et profilométrie-stéréo sur gel. Des reconstructions 3D des surfaces cutanées placées dans un courant contrôlé d’eau permettront d’examiner les propriétés tribologiques.
WP4 : les données obtenues apporteront les bases pour les simulations numériques de l’efficacité énergétique des déplacements. Le but est de développer un modèle prédictif qui intègre la taille et la forme du corps, la surface cutanée, la cinématique ondulatoire, et l’efficacité énergétique de tout serpent (ou robot) qui nage. Enfin, nous prévoyons d’extraire automatiquement les paramètres cinématiques clés de vidéos de serpents nageant, puis d’en dériver le coût du transport associé à chaque ondulation.
WP5 : avec le modèle prédictif nous estimerons l’efficacité énergétique de la nage sur un grand nombre d’espèces de serpents filmées dans la nature. La collection de cinématiques, riche et unique, représentative de la diversité des serpents (>3.700 espèces) permettra de prendre en compte le contexte phylogénétique.
Des facteurs importants comme la taille, le mode de chasse, le statut reproducteur ou le sexe seront analysés. Les grandes bases de données fourniront les paramètres pour optimiser la conception des prototypes de robots. Les codes numériques développés et les bases de données seront déposés auprès de l’INPI. Au-delà des objectifs fondamentaux en biologie évolutive, ce projet basé sur des techniques performantes et des serpents vivants pour comprendre l’efficacité hydrodynamique de la nage ondulatoire offre une opportunité pour que des laboratoires français participent à la compétition internationale de production de robots-serpents.


HaBiSan - Développement d'une plateforme robotique collaborative permettant à un robot d'assister le praticien dans ses gestions chirurgicaux
Dans l’objectif de mettre en œuvre une plateforme robotique de télé-opération et tester l’interaction d’un cobot avec son environnement, lors de l’exécution de tâches, nous avons développé deux interfaces haptique. La première interface à 6 degrés de liberté résulte de l’association d’une interface du commerce à 3 degrés de liberté (d.d.l) de translation avec une centrale inertielle pour les 3 d.d.l de rotation. La deuxième interface à 4 d.d.l possède une architecture innovante et en adéquation avec le cahier des charges de l’application de chirurgie mini invasive.
Nous avons programmé des tâches en mode téléopéré comme cela est prévu dans le cadre de l’approche proposée pour réaliser des tâches en télé-opération pour des applications médicales.
Des expérimentations d’interaction homme-robot ont été conduites avec succès, à l’aide de cette plateforme robotique en chirurgie mini-invasive, échographie doppler et neurochirurgie.
- Échographie Doppler :
L’examen complet d’échographie Doppler est réalisé par le praticien angiologue en mode téléopéré. Le praticien contrôle le cobot et module à distance les efforts exercés à travers la manipulation de l’interface de commande à retour d’effort et en interaction avec son environnement. Les efforts ressentis par le cobot au niveau de la sonde d’échographie sont restitués au praticien par l’intermédiaire du retour haptique de l’interface de commande.

Figure 1 : (a) Examen d’échographie Doppler en mode télé-opération (b) Interface à 6 ddl
On peut observer sur la Figure 1 le praticien qui manipule l’interface de commande à retour d’effort à distance du robot qui exécute les tâches générées par le praticien sous un contrôle permanant. Les efforts mis en jeu dans l’interaction du robot avec l’environnement, ici la sonde en contact avec la carotide, l’aorte et le membre inférieur, sont reproduits au niveau de l’interface de commande. Grâce à ce retour haptique, le praticien module les efforts exercés sans être obligé d’exercer des efforts conséquents, comme c’est le cas sans utilisation d’assistant robotique.
Dans un premier temps, grâce à l’utilisation d’un système robotique téléopéré aucune planification préopératoire de la trajectoire ne sera nécessaire car le chirurgien contrôle directement le cobot à l’aide d’un dispositif de commande pour réaliser une craniotomie. L’interface de contrôle haptique a permis non seulement de commander un cobot pour effectuer l’intervention de neurochirurgie, mais également de fournir un retour d’effort. L’utilisation de l’outil robotique a permis d’améliorer la précision et a réduit les complications inhérentes à cette tâche.
Dans un second temps, l’utilisation du cobot en mode comanipulation avec l’utilisation d’un capteur d’effort additionnel installé au niveau de son organe terminal a permis de mesurer d’une manière précise l’amplitude des efforts d’interactions du trépan chirurgical avec le crâne humain.
Toutes les opérations sont réalisées dans un environnement médical exploitant les outils de simulation en santé très réaliste en particulier le modèle cadavérique et le système « SimLife ».
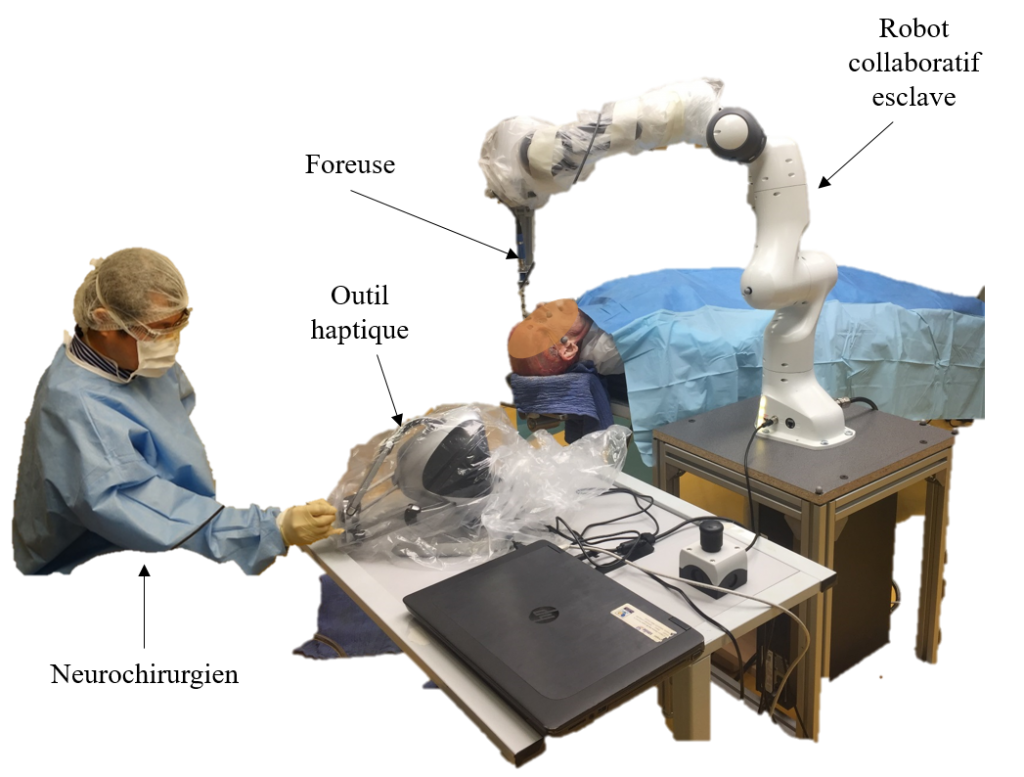
Figure 2 : (a) Plateforme de neurochirurgie, (b) Robot collaboratif avec un capteur d’effort à son organe terminal
- Chirurgie mini-invasive :
Une solution téléopérée complète pour la chirurgie mini-invasive par cœlioscopie est proposée. Cette solution comporte un dispositif de commande composé de deux interfaces maîtres à retour d’effort et une unité opératoire composée de deux robots esclaves. Les deux robots esclaves sont équipés chacun d’un préhenseur instrumenté permettant d’accueillir / manipuler des outils standards.
Une nouvelle interface haptique à architecture innovante adaptée au cahier des charges de l’application de chirurgie mini-invasive est proposée. La nouvelle architecture est optimisée et ses modèles associés sont développés.
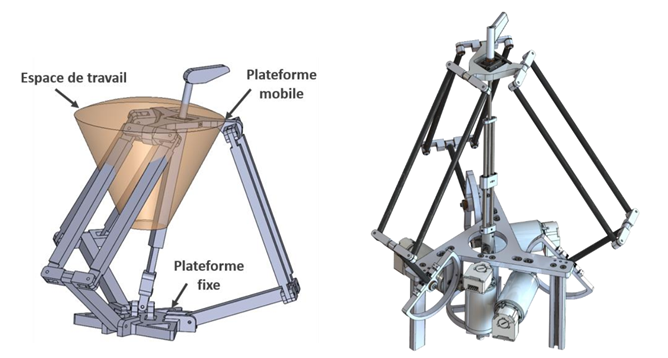
Figure 3 : (a) Représentation simplifiée de l’interface et son espace de travail, (b) CAO de l’interface à 4 d.d.l
Les interfaces et les préhenseurs n’ont pas pu être réalisés pour des raisons de délais non tenus relatifs à l’exécution du présent programme.
Production scientifique :
- Sandoval Arévalo, J.S.; Laribi, M.A.; Zeghloul, S.; Arsicault, M. On the Design of a Safe Human-Friendly Teleoperated System for Doppler Sonography. Robotics 2019, 8, 29. https://doi.org/10.3390/robotics8020029
- Préault, C., Saafi, H., Laribi, M., & Zeghloul, S. (2019). Optimal design and evaluation of a dexterous 4 DoFs haptic device based on delta architecture. Robotica, 37(7), 1267-1288. https://doi.org/10.1017/S0263574718000929
- Ayoubi, Y.; Laribi, M.A.; Zeghloul, S.; Arsicault, M. V2SOM: A Novel Safety Mechanism Dedicated to a Cobot’s Rotary Joints. Robotics 2019, 8, 18. https://doi.org/10.3390/robotics8010018
- Saafi, H., Laribi, M. A., Zeghloul, S., and Arsicault, M. (April 11, 2018). "On the Development of a New Master Device Used for Medical Tasks." J. Mechanisms Robotics. August 2018; 10(4): 044501. https://doi.org/10.1115/1.4039590
- Ayoubi, M.A. Laribi, F. Courrèges, S. Zeghloul, M. Arsicault “Complete design methodology of biomimetic safety device for cobots’ prismatic joints” Robotics and Autonomous Systems, Volume 102, 2018, Pages 44-53. https://doi.org/10.1016/j.robot.2018.01.008
- Nouaille, M.A. Laribi, C.A. Nelson, S. Zeghloul, G. Poisson « Review of kinematics for minimally invasive surgery and tele-echography robots », ASME. J. Med. Devices. 2017;11(4), (14 pages):040802-040802-14. https://doi.org/10.1115/1.4037053
- Lamine, M. A. Laribi, S. Bennour, L. Romdhane and S. Zeghloul, « Design study of a Cable-Based Gait Training Machine », Journal of Bionic Engineering Volume 14, Issue 2, April 2017, Pages 232–244. https://doi.org/10.1016/S1672-6529(16)60394-3



La Région et l'Union européenne soutiennent le projet "HABISAN : Développement d'une plateforme robotique collaborative permettant à un robot d'assister le praticien dans ses gestions chirurgicaux" dans le cadre du "Programme Opérationnel FEDER/FSE 2014-2020" et s'accompagne de l'emblème de l'Union européenne du FEDER et de la Région.
 Robotic Assisted system for safe Cervical Surgery (2025-2030)
Robotic Assisted system for safe Cervical Surgery (2025-2030)
International Research Project
Site web : https://irp-races.prd.fr/
Ce projet de recherche collaboratif vise à développer une plateforme robotique sure pour la chirurgie de la colonne vertébrale. Le système à proposer sera constitué d’un bras robotique collaboratif et d’une interface de commande à retour haptique. L’ensemble du système viendra assister le chirurgien dans un schéma de co-manipulation ou tele-opération. L’utilisation de l’outil robotique vise à améliorer la précision et à réduire les taux de complications. Grâce à cette technologie robotique, les chirurgiens et les neurochirurgiens en particulier pourront planifier des procédures et obtenir des résultats reproductibles.
Code CMCU : 19G1121 – Code Campus France : PHC Utique 41778YB
APPROCHES INNOVANTES POUR LA RÉÉDUCATION FONCTIONNELLE ET LA ROBOTIQUE D’ASSISTANCE AUX PATIENTS ET AUX EXPERTS MÉDICAUX (Fun2Rob)
Responsable Tunisien (LMS) : Abdelbadiâ Chaker
Responsable Français (PPRIME) : Med Amine Laribi
Le projet Fun2Rob, porté par le Laboratoire de Mécanique de Sousse (LMS) et l’institut PPRIME vise à développer un robot d’assistance dédié à la rééducation fonctionnelle des membres supérieurs.
1ère année
Cette première année a vu le lancement du projet et des travaux de recherche associés qui ont impliqué sept chercheurs seniors et deux chercheurs juniors.
- Travaux de Ferdaws Ennaiem (Thèse en cotutelle)
La doctorante Ferdaws Ennaiem inscrite en thèse en cotutelle a réalisé un état de l’art sur le domaine de la robotique d’assistance et de rééducation fonctionnelle, en particulier les robots à câbles offrants des avantages majeurs pour l’application visée.
La doctorante a ensuite implémenté les modèles cinématique et dynamique d’un robot à câble, à architecture classique, à six degrés de liberté. Une Interface Matlab était ensuite développée pour simuler les trajectoires et les paramètres cinématiques du robot. Ce travail a fait l’objet de présentations et discussions au cours de la première réunion du projet en Tunisie, dans les locaux du LMS à Sousse.
En parallèle de ce travail, la doctorante a analysé les enregistrements de la première compagne de mesures, réalisés à l’institut Pprime et conduite en étroite collaboration avec les praticiens. Elle a participé par la suite, lors de son séjour à Poitiers, à la deuxième compagne de capture de mouvement avec la participation de six sujets (voir Figure 1).

Figure 1: Compagne de capture de mouvement dans les locaux de l’institut Pprime et reconstruction du modèle.
Les mouvements enregistrés par capture de mouvement se déclinent en quatre familles comme suit : main-bouche, main-tête, main-poignet et main-objet. Pour chaque famille de mouvement l’enregistrement s’est focalisé sur la position et l’orientation du membre supérieur.
La doctorante a créé une base de données regroupant toutes les captures et les données nécessaires à l’élaboration du cahier des charges. Dans cet objectif, un algorithme est implémenté pour le calcul des vitesses et des accélérations du geste d’une part, et pour le relevé du nuage des points retraçant les trajectoires du membre supérieur d’autre part (Figure 2). Cet algorithme exploite les coordonnées des différents marqueurs installés sur le membre supérieur du sujet. Cette approche a permis de déterminer les trajectoires du centre du poignet et les orientations de la main au cours des mouvements fonctionnels (Figure 2).
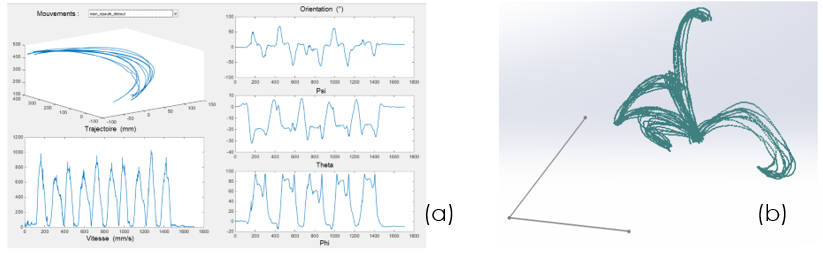
Figure 2 : (a) Interface de calcul des vitesses et des orientations - (b) Trajectoire du centre de la main.
Ces informations sont cruciales dans la caractérisation de l’espace de travail du robot à câble à concevoir.
Par ailleurs, la doctorante a développé lors de son séjour à Poitiers une approche de conception optimale dédiée aux robots à câbles plan. L’hypothèse simplificatrice du cas plan permettra de traiter le problème avec un degré de difficulté ascendant, jusqu’au traitement du cas spatial et l’exploitation des trajectoires enregistrés par capture de mouvement.
- Travaux du Post-Doctorant Houssein Lamine
Dans le même contexte, le séjour du docteur Houssein Lamine a porté sur le développement d’un prototype de robot à câble plan, exploitant les résultats de l’approche d’optimisation, pour les premières validations expérimentales.
M. Lamine a réalisé durant son stage l’étude et la conception du robot avec les différents sous-systèmes, à savoir le dispositif d'enroulement de câble, la solution de montage de sortie de câble et la plateforme mobile avec son indexation nécessaire pour la calibration. La réalisation des différents pièces, l’assemblage mécanique du robot, ainsi que les différents réglages associés sont effectués.
Un programme Matlab dédié à la commande du robot à câble est développé. Il permet une commande synchronisée des quatre actionneurs du robot, en vue d’intégrer des modèles plus complexes issu des travaux de thèse. M. Lamine a configuré, mis en service les différents actionneurs et résolu tous les aspects techniques liés à la communication entre les moteurs et la carte de contrôle.
La qualité des résultats obtenus lors de cette première année offre de bonnes perspectives de publications scientifiques. Actuellement plusieurs articles et communications sont en cours de rédaction pour valoriser les travaux en cours.
2ème année
Cette deuxième année a porté sur la réalisation d’un premier prototype de robot parallèle à câbles et la validation expérimentale de l’approche de conception optimale et de contrôle commande.
Le déroulement de l’année a été impacté par la crise sanitaire exceptionnelle en lien avec la COVID-19 et la fermeture des laboratoires suite au confinement. Malgré ceci, les séjours de la doctorante en cotutelle et la post-doctorante ont pu être réalisés. Cependant, les autres missions des chercheurs séniors et porteurs du projet ont été annulées.
Les réunions précédemment programmées en présentiel ont été remplacées par des réunions par visioconférence afin d’assurer la continuité des travaux et le bon déroulement du projet.
Les travaux menés lors de cette deuxième année ont impliqué huit chercheurs seniors et deux chercheurs juniors.
- Travaux de Ferdaws Ennaiem (Thèse en cotutelle)
La doctorante Ferdaws Ennaiem, inscrite en deuxième année de thèse en cotutelle entre l’Université de Poitiers et l’Université de Sousse, a poursuivi lors de cette année ces travaux sur le développement d’approche optimale pour la synthèse des robots parallèles à câbles dédiés à la rééducation fonctionnelle.
Le travail réalisé durant cette année est partagé principalement en deux parties. Dans un premier temps, l’objectif était d’identifier les paramètres géométriques de la solution optimale d’un robot à câbles plan sujet à un ensemble de critères et de contraintes. Ce robot ayant quatre câbles, comme illustré dans la Figure 1, assurera des mouvements à 3 degrés de liberté (deux translations et une rotation). Il est conçu pour reproduire des mouvements de rééducation simple dans le plan. La résolution du problème d’optimisation est réalisée en s’appuyant sur la méthode de l’algorithme génétique (GA) et l’algorithme Particle Swarm Optimization (PSO).
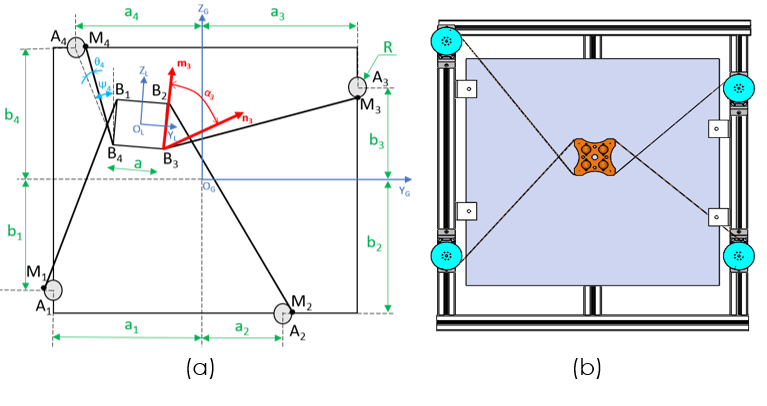
Figure 1. Robot à câbles plan : (a) paramétrage (b) modèle CAO.
Dans un second temps, la même démarche de synthèse optimale est appliquée mais avec des trajectoires plus complexes couvrant des activités de la vie quotidienne. Une première structure optimale d’un robot parallèle à câbles adapté pour un mouvement 3D spatial a été proposée.
En exploitant les résultats de la capture de mouvement réalisée durant la première année, une étude comparative a été effectuée dans le but d’identifier une possible similitude entre les trajectoires. Ces dernières sont extraites des mouvements enregistrés pour chaque volontaire et caractérisés par des paramètres cinématiques, notamment les positions des articulations et les orientations des segments du membre supérieur. L’ensemble des trajectoires ont été comparées en utilisant la méthode d’analyse de la variance « ANOVA » et la méthode Tukey afin d’identifier les paramètres derrière cette différence. En résultat de cette analyse, on a conclu que chaque patient admet une trajectoire propre à son mouvement avec un degrés de variance proche de 5% par rapport aux trajectoires des autres sujets. Cette variabilité inter sujet est encore plus importante au niveau des orientations.
A cet effet, l’espace de travail du robot doit couvrir l’ensemble des trajectoires enregistrées et il sera circonscrit par la trajectoire la plus large en position et en orientation. Ainsi, l’espace de travail sera délimité comme mentionné sur les Figures 2 et 3.
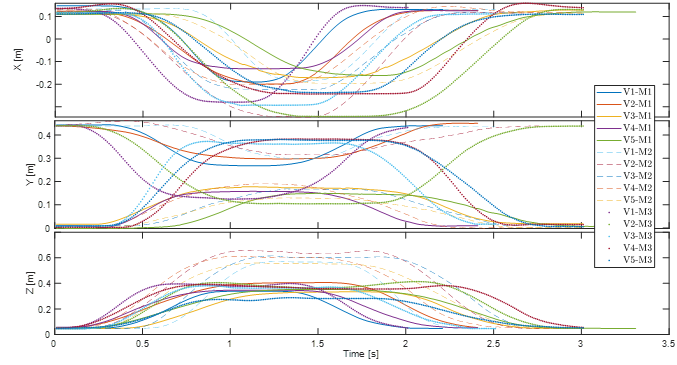
Figure 2. Trajectoires selon X, Y et Z délimitant l’espace de travail.
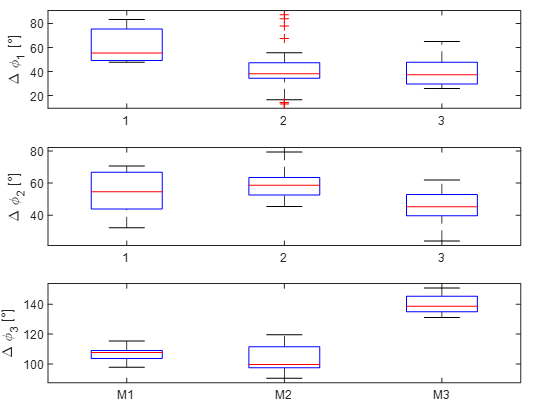
Figure 3. Plages de variation des 3 angles de rotation calculées pour les 3 mouvements (M1: main-bouche, M2: main-tête, M3: main-épaule).
- Travaux de la Post-Doctorante Hanén El Golli
Le séjour postdoctoral de Hanén El Golli a porté sur l’instrumentation et le choix du schéma de contrôle du prototype du robot à câbles plan dans l’objectif de réaliser la validation expérimentale. Dans un premier lieu, Mme. El Golli a modélisé et implémenté le modèle dynamique du robot à câbles plan. Une modification est apportée à la conception initiale afin de solutionner le problème en lien avec le couple induit par le croisement des câbles et le frottement au niveau de l’organe terminal. Dans un second lieu, la postdoctorante a validé expérimentalement différents types de trajectoires à travers un programme Matlab dédié à la commande du robot à câbles. Ce programme a permis la validation d’une commande en position, synchronisant les quatre actionneurs du robot, et l’avancement d’une commande en couple (en compliance).
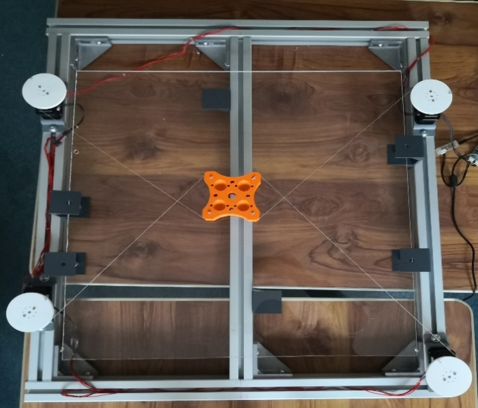
Figure 4. Prototype du robot parallèle à câbles plan.
La qualité de l’ensemble des résultats obtenus lors de cette deuxième année a conduit à la rédaction des publications citées ci-dessous. Actuellement plusieurs articles de revues sont en cours de rédaction.
Liste des publications :
[1] Ennaiem F. et al. (2021) Daily Life Activities Analysis for Rehabilitation Purposes. In: Rauter G., Cattin P.C., Zam A., Riener R., Carbone G., Pisla D. (eds) New Trends in Medical and Service Robotics. MESROB 2020. Mechanisms and Machine Science, vol 93. Springer, Cham. https://doi.org/10.1007/978-3-030-58104-6_33
[2] Ennaiem F. et al. (2020) Optimal Design of a Rehabilitation Four Cable-Driven Parallel Robot for Daily Living Activities. In: Zeghloul S., Laribi M., Sandoval J. (eds) Advances in Service and Industrial Robotics. RAAD 2020. Mechanisms and Machine Science, vol 84. Springer, Cham. https://doi.org/10.1007/978-3-030-48989-2_1
[3] Ennaiem, F., Chaker, A., Sandoval, J.S., Laribi, M. A., Bennour, S., Mlika, A., Romdhane, L & Zeghloul, S. (2020), « Upper limb movement variability analysis during activities of daily living ». In the 45th congress of the Société de Biomécanique.
[4] Ennaiem F. et al. (2020) Focus on rehabilitation exercises in view of cable-driven parallel robot design. Congres Tunisien de Mécanique (COTUME 2020) Mars 2021, Hamamet, Tunisie
Organisation de session spéciale :
Organisation d’une session spéciale intitulé « special session on Fun2Rob » dans le cadre de la conférence internationale RAAD2020 sponsorisé par l’IFToMM. Cette session porte sur la problématique de la conception des robots d’assistance.